جف کاردناس می کشد مک بوک خود را بیرون آورد یکی از بنیانگذاران و مدیر عامل Apptronik یک نمایش اسلاید دارد که می خواهد نشان دهد و تاریخ هفت ساله استارت آپ آستین را به پایان برساند. در واقع، کمی زمینه سازی می خواهد. مانند بسیاری از شرکتهای روباتیک، این شرکت در اولین روزهای خود از قراردادهای دولتی حمایت میکرد.
اولین بار Valkyrie 2 بود، دومین تکرار ربات فضایی انسان نما ناسا. شرکت جوان یکی از معدود شرکتهایی بود که وظیفه کمک به زنده کردن آن سیستم را بر عهده داشتند. کمک آن به این پازل، محرکهای رباتیک خنکشونده با مایع بود که در آزمایشگاه روباتهای انسان محور در دانشگاه تگزاس به رهبری یکی از بنیانگذاران و دانشمند ارشد Apptronik، لوئیس سنتیس، توسعه یافتند.
بعدی اسکلت های بیرونی بود. فرماندهی عملیات ویژه ایالات متحده (USSOCOM) که در بازار “کت و شلوار مرد آهنی” بود.

اعتبار تصویر: برایان هیتر
“[The]کاردناس می گوید: اسکلت بیرونی با مایع خنک می شد. ما با انجام این کار چیزهای زیادی یاد گرفتیم. پیچیدگی سیستم خیلی زیاد بود. سنگین بود. ما تمام محرک ها را از راه دور انجام دادیم. و سپس متوجه شدیم که ساده ترین نسخه یک ربات انسان نما چیست: یک دستکاری کننده موبایل. بسیاری از افراد لجستیکی که نمیخواستند برای تولید تسلیحات پولی بپردازند، به ما مراجعه کردند. آنها برای آنچه که نیاز داشتند بسیار دقیق بودند. چیزی که آنها می خواستند یک بازوی لجستیکی رباتیک مقرون به صرفه بود.
بازوهای صنعتی بسیار دور نوک نیزه بوده اند و تقریباً 60 سال است که وجود داشته اند. در آن زمان، سازندگانی مانند Fanuc و Kuka دقت میلیمتری را مهندسی کردهاند. این چیزی است که برای تولید ضروری است و برای اکثر کارهای لجستیکی بیش از حد نیاز است. برای مثال، نصب سیستم های الکتریکی در خودروها، به دقت بسیار بیشتری نسبت به جابجایی جعبه از نقطه a به نقطه b نیاز دارد.
کاردناس میگوید: «کاری که بسیاری از مردم در رباتهای انساننما انجام میدهند، اساساً تلاش برای ساختن آنها به همان روشی است که ما برای مدت طولانی بازوهای رباتیک صنعتی ساختهایم. یکی از ایدههای کلیدی Apptronik این است که روشی که ما برای ساخت این روباتها نیاز داریم – زمانی که شما یک سیستم آزادی 30 درجه دارید – اساساً متفاوت است. چیزهایی که ما نیاز داریم متفاوت است. ما به آنها نیاز داریم که در اطراف انسان ها ایمن باشند، به آنها نیاز داریم که در برابر محیط اطرافشان بسیار مقاوم باشند. ما به آنها نیاز داریم که از انرژی بسیار کارآمد باشند. این مجموعه جدیدی از محدودیتها است که سعی میکنیم آنها را بهینه کنیم. با استفاده از همان معماری تمام بازوهایی که در آنجا می بینید [at Automate] و برون یابی که منطقی نیست. این یک معماری اساساً متفاوت است که در آن ما تقریباً یک سوم اجزای کمتری در هر محرک داریم، حدود یک سوم زمان مونتاژ طول میکشد.
اعتبار تصویر: Apptronik
به چند دلیل، لجستیک مکانی منطقی برای فرود شرکتی مانند Apptronik است. همه نمی خواهند برای همیشه از قراردادهای دولتی حمایت کنند. در طی چندین سال گذشته، تدارکات/تحقق به عنوان داغ ترین مقوله در فضای رباتیک مطرح شده است. مانند شرکتهای بیشماری که از تحقیقات به دنیای محصولات تجاری معطوف شدهاند، این شرکت باید تعیین میکرد که آیا بازار مناسبی برای فناوری ایجاد شده وجود دارد یا خیر.
کاردناس می گوید: «هدف رسیدن به انسان نما بود. انسان نما نوعی جام مقدس است. احتمالاً تنها چیزی که در زمان شروع ما ثابت بود این بود که «انساننماها را انجام ندهید. آنها بیش از حد پیچیده هستند. ”
ارزش واقعی رباتهای انساننما در محل کار هنوز یک سوال بسیار باز است. اما حداقل، Apptronik تنها کسی نیست که آن را میپرسد. اعلامیه Optimus تسلا که بسیار تبلیغ شده بود چیزی را تکان داد. ناگهان شرکتهایی که در حالت مخفی کار میکردند، ناگزیر شدند که مقاصد خود را اعلام کنند. استارتآپهایی مانند 1X و Figure پیشرفت خود را به میزانهای مختلفی مورد بحث قرار دادهاند. Sanctuary AI که با سخت افزار Apptronik همکاری کرده است، قبلاً سیستم های آزمایشی را آغاز کرده است.
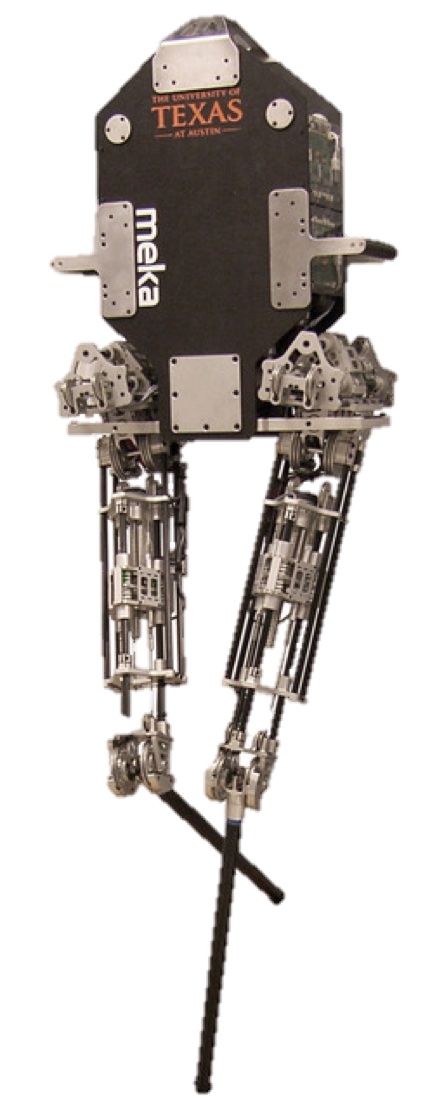
Apptronik، به نوبه خود، تا کنون دو نیمه از یک ربات را به نمایش گذاشته است. Astra، بدنه بالایی یک ربات انسان نما وجود دارد که می تواند روی یک ربات متحرک مستقل (AMR) نصب شود. در طرف دیگر دراکو قرار دارد که به معنای واقعی کلمه تمام پاها است. این شرکت از آن به عنوان “اولین دوپا” خود یاد می کند که درست است – اما این واقعاً تمام چیزی است که وجود دارد.
بخشی از نمایش اسلاید بداهه ما ویدئوهایی از پاهای باریک راه رفتن در اطراف آزمایشگاه های Apptronik است. از نظر ظاهری به سرعتهای Cassie نرسیده است، اما از نگاهی صرف به آن، راه رفتن سریعتر از آنچه تسلا در ویدیوهای اخیر Optimus خود نشان داد، به نظر میرسد. چیزی که پس از بررسی تعداد انگشت شماری از این پروژه های به ظاهر متفاوت مشخص می شود این است که Apptronik از همان ابتدا در حال ساخت ربات انسان نمای کامل خود بوده است.

اعتبار تصویر: Apptronik
Cardenas میگوید که این شرکت تا زمانی که حدود 40 تا 50 نفر را تحت تأثیر قرار داده است، در بسیاری از عمر خود راهاندازی شده است. پس از رونمایی رسمی از سیستم کامل انسان نمای خود در تابستان امسال، این شرکت سری A را بررسی خواهد کرد. او می افزاید: «ما همه این بلوک های ساختمانی را داریم. «بسیاری از آنها تکرار شده و ایدههای جدید را امتحان کردهاند. مزیت بوت استرپینگ این است که ما برای مدت طولانی به آن اعتقاد داشته ایم. ما اکنون حدود یک دهه است که به عنوان یک تیم، از والکری، در این کار بوده ایم.
در حال حاضر، این شرکت در حال کار بر روی راه رفتن و ایجاد عملکرد اصلی ربات قبل از راه اندازی است. قابل درک است که می خواهد نشان دهد که محصول در واقع طبق برنامه ریزی قبل از نمایش آن به جهان عمل می کند. این یک رویکرد کاملاً متفاوت با کاری است که تسلا با Optimus انجام داده است، و اگر همه چیز طبق برنامه پیش برود، این شرکت را به افزایش عمده بعدی خود سوق خواهد داد.
Cardenas تصاویری – هم رندر و هم عکس – از آپولو را به من نشان می دهد، سیستمی که قصد دارد تابستان امسال عرضه کند. من نمیتوانم آنها را در اینجا به اشتراک بگذارم، اما میتوانم به شما بگویم که طراحی آن نوع تکامل همگرای را که توضیح دادم، کاهش میدهد، که تسلا، Figure و 1X مبتنی بر OpenAI را نشان میدهد که رندرهایی را با یک زبان طراحی مشترک نشان میدهند. آپولو – در یک کلام – دوستانهتر از هر یک از این سیستمها و ربات Valkyrie ناسا است که قبل از آن ساخته شده است.
ویژگی های طراحی بسیار بیشتری را با Astra به اشتراک می گذارد. در واقع، حتی ممکن است تا آنجا پیش بروم که آن را بهعنوان زیباییشناسی کارتونی توصیف کنم، با سر به شکل یک iMac قدیمی، و ترکیبی از چشمهای دکمهای و نمایشگر که صورت را تشکیل میدهند. در حالی که درست است که اکثر مردم با این سیستمها که برای کار در مکانهایی مانند انبارها و کف کارخانهها طراحی شدهاند، تعامل ندارند، لازم نیست به خاطر جذاب به نظر رسیدن، از شوم استقبال کنیم.
از برخی جهات، بخش همه منظوره سخت تر از بیت انسان نما است. این بدان معنا نیست که ساخت یک ربات دوپا کاملاً متحرک و گویا با هر تصوری آسان است، اما شکاف بزرگی بین هدف خاص و عمومی وجود دارد. تعریف دقیق دومی یک مکالمه برای یک روز دیگر است، اما برای بسیاری، این برچسب سیستمی را توصیف می کند که کاملاً در حال انطباق است. برای برخی، این به معنای چیزی شبیه یک API و فروشگاه برنامه برای توسعه دهندگان شخص ثالث برای ایجاد مهارت است، اما سیستم ها همچنان باید با محیط اطراف خود سازگار شوند. در حالت ایده آل، این ماشینی است که می تواند هر کاری را که یک انسان می تواند انجام دهد.
خیلی اوقات، مردم نمی توانند حد وسط وسیعی که سیستم های چند منظوره است را تشخیص دهند. در حال حاضر، این مکان بسیار عمل گرایانه تری برای فعالیت است. تصور تسلا از روباتی که میتواند تمام روز را در کارخانه کار کند، خرید مواد غذایی خود را انجام دهد و به خانه بیاید و برای شما شام بپزد، انتظارات عجیب و غریب موجود را که دههها داستان علمی تخیلی آن را تقویت کردهاند، تغذیه میکند.
کاردناس میگوید: «برای اینکه آن را مجبور به انجام چندین کار کنیم، هنوز روزهای اولیه است، اما برنامههای کاربردی کافی وجود دارد که اگر بتوانیم کارهای سادهای مانند انتقال یک جعبه از نقطه a به نقطه b انجام دهیم، دهها هزار واحد وجود دارد. ارزش مطالبات برای این برنامه ها.
مانند همه کارها در فضا، این مکالمات نیاز به این نکته دارد که ما هنوز در مراحل بسیار اولیه هستیم. چابکی احتمالاً از نظر اثبات کارایی یک ربات انسان نما (یا حداقل دوپا) در یک محیط انبار فراتر رفته است. اما حتی آنها راه درازی در پیش دارند.
صرف نظر از این، چند سال آینده بینش شگفت انگیزی در مورد اینکه این اوج تحقیقات دهه ها به کجا می رود ارائه خواهد داد.